
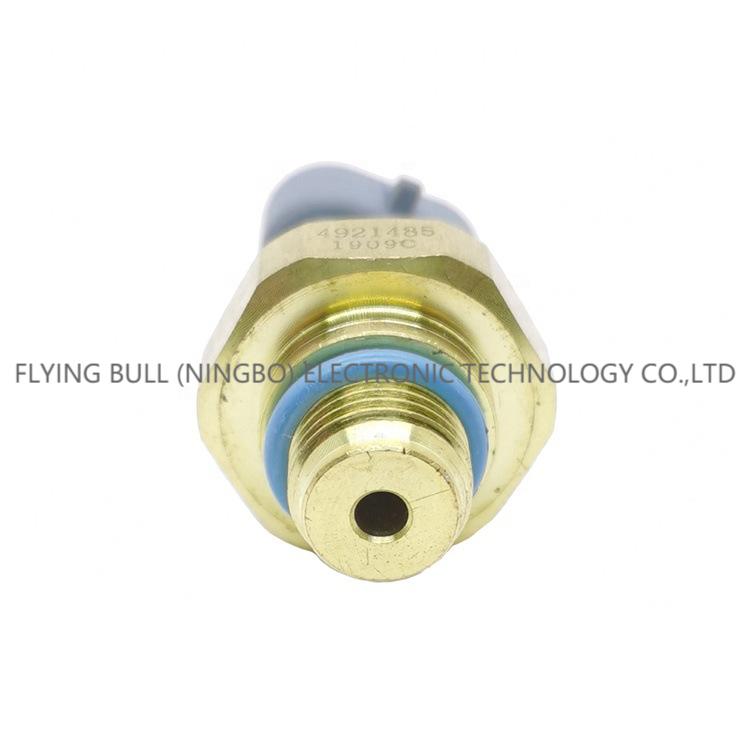
Հարմար է Cummins L10 N14 M11 նավթի ճնշման ցուցիչ 4921485



Ապրանքի ներածություն
Capacitive դիրքի ցուցիչ
1. Capacitive դիրքի ցուցիչը ոչ կոնտակտային դիրքի ցուցիչ է, որը սովորաբար բաղկացած է երեք մասից, հայտնաբերման տարածք, պաշտպանիչ շերտ եւ կեղեւ: Նրանք կարող են չափել թիրախի ճշգրիտ դիրքը, բայց միայն օբյեկտը: Եթե չափված օբյեկտը ոչ թե հաղորդիչ չէ, ապա դեռ օգտակար է չափել դրա հաստությունը կամ խտությունը:
2. Հաղորդական օբյեկտի չափումը, ելքային ազդանշանը ոչ մի կապ չունի օբյեկտի նյութի հետ, քանի որ հզոր տեղահանման ցուցիչի համար բոլոր դիրիժորները նույն էլեկտրոդն են: Այս տեսակի սենսորը հիմնականում օգտագործվում է սկավառակի սկավառակի, կիսահաղորդչային տեխնոլոգիայի եւ բարձր ճշգրտության արդյունաբերական չափման մեջ, բայց դա պահանջում է շատ բարձր ճշգրտություն եւ հաճախականության պատասխան: Ոչ հաղորդիչների չափման համար օգտագործված, կարող է պարապի հզորության ցուցիչները սովորաբար օգտագործվում են պիտակների, ծածկույթների կամ ֆիլմի հաստությունը չափելու համար:
3. Ակնարկային դիրքի ցուցիչն ի սկզբանե օգտագործվում էր գծային տեղահանման հեռավորությունը չափելու համար, սկսած մի քանի միլիմետրից մի քանի նանոմետրեր, եւ չափումն ավարտվեց, օգտագործելով հաղորդունակության էլեկտրական բնութագրերը: Պահպանման համար օբյեկտի ունակությունը կոչվում է կոնդենսացիա: Լիցքավորման պահեստավորման համար ընդհանուր կոնդենսատոր սարքը ափսեի կոնդենսատոր է: Ափսեի կոնդենսատորի հզորությունը ուղղակիորեն համաչափ է էլեկտրոդի տարածքի եւ դիէլեկտրական կայունության եւ հակադարձ համամասնորեն էլեկտրոդների միջեւ հեռավորության վրա: Հետեւաբար, երբ էլեկտրոդների միջեւ եղած հեռավորությունը փոխվում է, հզորությունը նույնպես փոխվում է: Մի խոսքով, Capacitive դիրքի ցուցիչն օգտագործում է այս բնութագիրը `դիրքի հայտնաբերումը լրացնելու համար:
4. Կարող է բնորոշ հզոր դիրքի ցուցիչ ներառված երկու մետաղական էլեկտրոդ, օդով, որպես դիէլեկտրական: Սենսորի մեկ էլեկտրոդը մետաղական ափսե է, իսկ կոնդենսատորի մյուս էլեկտրոդը կազմված է հայտնաբերելու հաղորդիչ օբյեկտից: Երբ վարորդների ափսեների միջեւ լարումը կիրառվում է, էլեկտրական դաշտը հաստատվում է ափսեների միջեւ, եւ երկու սալերը դրական մեղադրանքներ եւ բացասական գանձումներ են պահում համապատասխանաբար: Capacitive դիրքի ցուցիչը սովորաբար ընդունում է AC լարման, ինչը պարբերաբար լիցքավորվում է ափսեի մեջ փոխելու բեւեռականությունը, ուստի նպատակային դիրքի փոփոխությունը կարող է հայտնաբերվել երկու սալերի միջեւ հզորությունը չափելու միջոցով:
5. Հզորությունը որոշվում է ափսեների միջեւ հեռավորության վրա, դիէլեկտրիկի դիէլեկտրական կայունությունը եւ ափսեների միջեւ հեռավորությունը: Սենսորների մեծ մասում էլեկտրոդի ափսեի տարածքը եւ դիէլեկտրական կայունությունը չեն փոխվի, միայն հեռավորությունը կազդի էլեկտրոդի եւ նպատակային օբյեկտի միջեւ հզորացման վրա: Հետեւաբար, հզորության փոփոխությունը կարող է ցույց տալ նպատակային դիրքը: Calibration- ի միջոցով սենսորի ելքային լարման ազդանշանը գծային փոխհարաբերություններ ունի հայտնաբերման խորհրդի եւ թիրախի միջեւ հեռավորության վրա: Սա սենսորի զգայունությունն է: Այն արտացոլում է ելքային լարման փոփոխության հարաբերակցությունը դիրքի փոփոխության մեջ: Միավորը սովորաբար 1V / Micron է, այսինքն, ելքային լարման փոփոխում է 1 Վ-ը յուրաքանչյուր 100 միկրո:
6. Երբ լարը կիրառվում է հայտնաբերման վայրի վրա, հայտնաբերված օբյեկտի վրա կստեղծվի ցրված էլեկտրական դաշտ: Միջամտությունը նվազեցնելու համար ավելացվում է պաշտպանիչ շերտ: Այն կիրառում է նույն էլեկտրամոտակայուն ուժը հայտնաբերման տարածքի երկու ծայրերում `էլեկտրական դաշտը հայտնաբերման վայրում արտահոսքից կանխելու համար: Դրսեւորյալները այլ հայտնաբերման տարածքներից դուրս կկազմեն էլեկտրական դաշտ պաշտպանիչ շերտով եւ չեն խառնվի էլեկտրական դաշտին թիրախի եւ հայտնաբերման տարածքի միջեւ: Պաշտպանիչ շերտի պատճառով հայտնաբերման տարածքում էլեկտրական դաշտը կոնաձեւ է: Հայտնաբերման էլեկտրոդով արտանետվող էլեկտրական դաշտի կանխատեսվող տարածքը 30% -ով ավելի մեծ է, քան հայտնաբերման տարածքը: Հետեւաբար հայտնաբերված օբյեկտի տրամագծի մակերեսը պետք է լինի առնվազն 30% ավելի մեծ, քան ցուցիչի հայտնաբերման տարածքը:
Ապրանքի նկար

Ընկերության մանրամասները







Ընկերության առավելությունն առավելություն

Փոխադրում

ՀՏՀ

Առնչվող ապրանքներ








